Introduction to Matrices
What is a matrix?
What is a square matrix?
How do we do arithmetic with matrices? (which ones can we do it with?)
What is an identity matrix?
What is a zero matrix?
Worked Examples
1.) For the matrices A = 





- A – E
- C + D
- E + A – B
- F + D
- D – C
- 4F
2.) Calculate

3.) Calculate
Exercise 1

Answers to Exercise 1

Worked Solutions to Exercise 1
Introduction to Row Operations and Inverse Matrices
What are the three row operations?
How can we use these to find the inverse of a square matrix of any size? ([A|I] = [I|A-1] (we will find out why in FP2 when we talk about augmented matrices and think of matrices as a way of solving systems of equations).
What is row echelon form? What is reduced row echelon form?
What are singular and non-singular matrices?
I will find the inverse of:

You can find the inverse of:
With a 2×2 matrix we can use a formula as a quick alternative to find the inverse:
If M = 

N.B. (AB)-1 = B-1A-1
Worked Examples
1.) If B = 
2.) If M = 

- M-1
- N-1
- MN
- NM
- (MN)-1
- (NM)-1
- M-1N-1
- N-1M-1
For a 3×3 matrix we can also use a slightly more complicated formula to find the inverse using cofactors. We can come back and look at this and compare it with the Gaussian method after we have learned about determinants (further down).
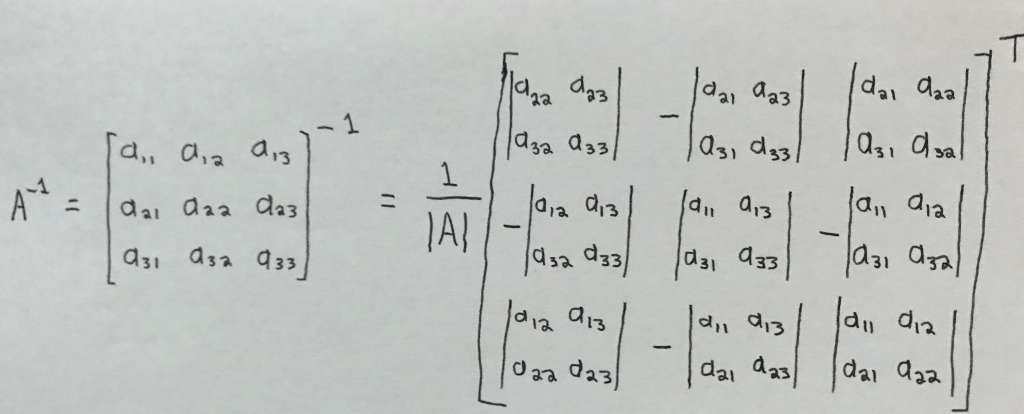
Worked Example
Find the inverse of the matrix N without using a calculator, where N =

Exercise 2
Answers to Exercise 2

Worked Solutions to Exercise 2
Introduction to Determinants
ad-bc is the determinant of:


Each of the terms is called a minor
Worked Examples
1.) Find the determinant of N =


Determinants of larger matrices
If we reduce a matrix to row echelon form, then the determinant is the product of the values in the leading diagonal.
The row operations switching rows and adding rows do not affect the determinant.
The row operation multiplying a row by a scalar increases the determinant by that scalar multiple (so if we do this when reducing a matrix, we must divide the determinant calculated by this number.
Det (A) = 0 means that the matrix is singular.
Transposing a matrix also doesn’t affect the determinant.
Worked Example
Given that P = 

- det P;
- det Q;
- det PQ. What do you notice?
Alternative method for finding determinants
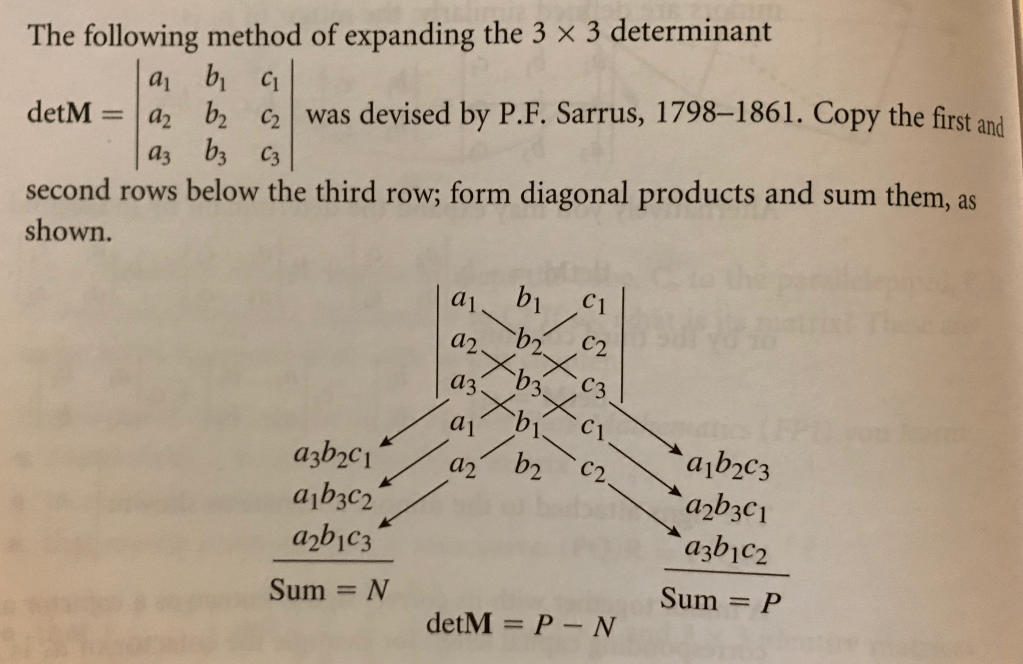
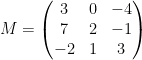
Find the determinant of the matrix
Exercise 3

Answers to Exercise 3
Worked Solutions to Exercise 3
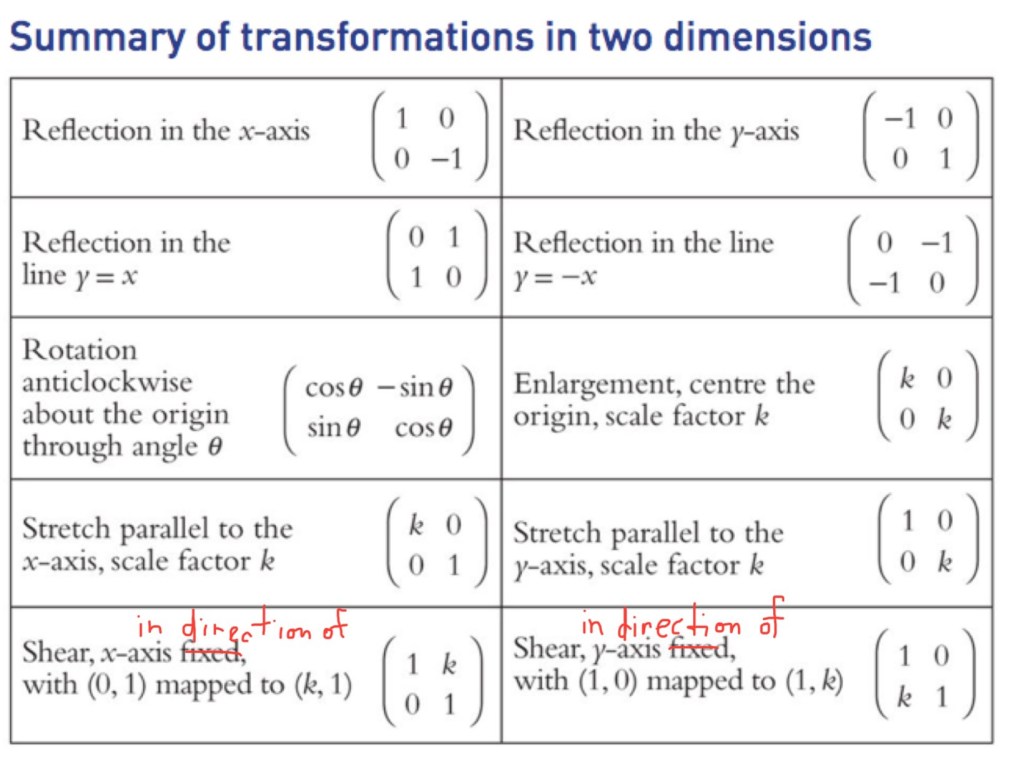
Introduction to Matrix Transformations
Consider (pre-)multiplying the position vector 



Of course a transformation affects not just a single point, but the whole plane, e.g. consider effect on rectangle: A:(1,1), B:(1,2), C;(3,1), D:(3,2)
Any point in the plane unchanged by a transformation is an invariant point. The origin is always an invariant point.
Any line unchanged by a transformation is an invariant line (N.B. points on this line may move to another point, but only within the line). For an enlargement matrix, the x-axis and y-axis are both invariant lines.
When enlarging a shape, the area of the shape is increased by the determinant of the transformation matrix.
What transformation will the following two matrices effect?: 

If you imagine reflecting in the y-axis and then reflecting in the x-axis, the combined transformation is effectively a rotation by 180 degrees. So the transformation matrix for this is: 
We want a rotation matrix that will work for any different angle.
Consider the point (x,0)
In order that changing the angle (theta) will rotate anticlockwise by the specified amount, we want:
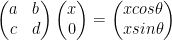
So ax = xcos𝜽 and cx = xsin𝜽
So a = cos𝜽 and c = sin𝜽
As we don’t want an enlargement |A| = ad-bc = 1 and so dcos𝜽 – bsin𝜽 = 1.
From Pythagoras’ Theorem, we know that one solution for this is b = -sin𝜽, d = cos𝜽.
So our rotation matrix is:

For instance, a 90º clockwise rotation would be achieved with

As well as enlargement, reflection, and rotation, we also have shearing.
In a shear, all points in the plane are stretched in the same direction, but the extent of the stretch is proportional to the distance from the axes. Below shows the effect of a transformation of 

Note 1: The inverse of a transformation matrix always undoes the transformation
Note 2: Any transformations can be combined by multiplying the matrices together
Invariant Lines
Invariant lines must have the form y=mx+c
We can find m by solving the following, which checks that if the object is on the invariant line, the the image is also on this line:

Worked Examples







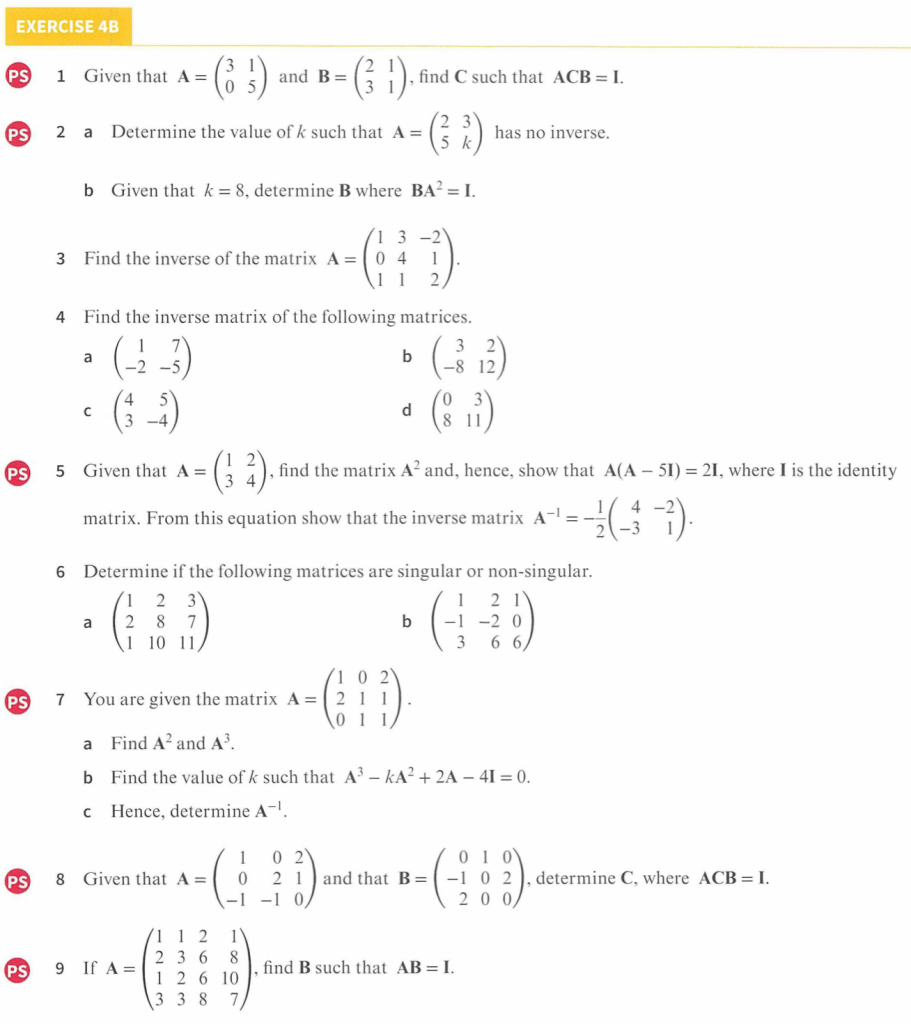
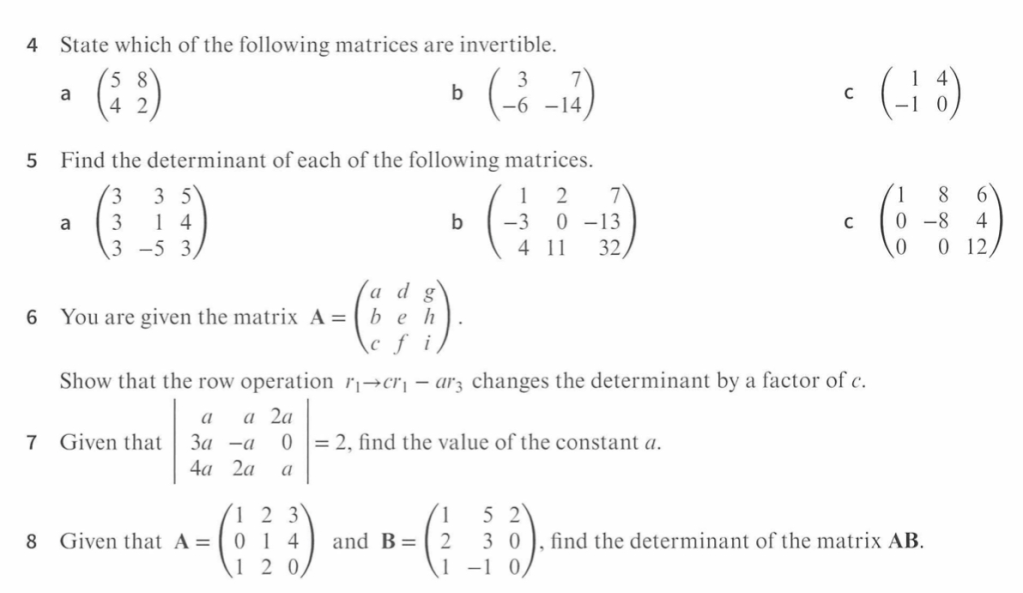
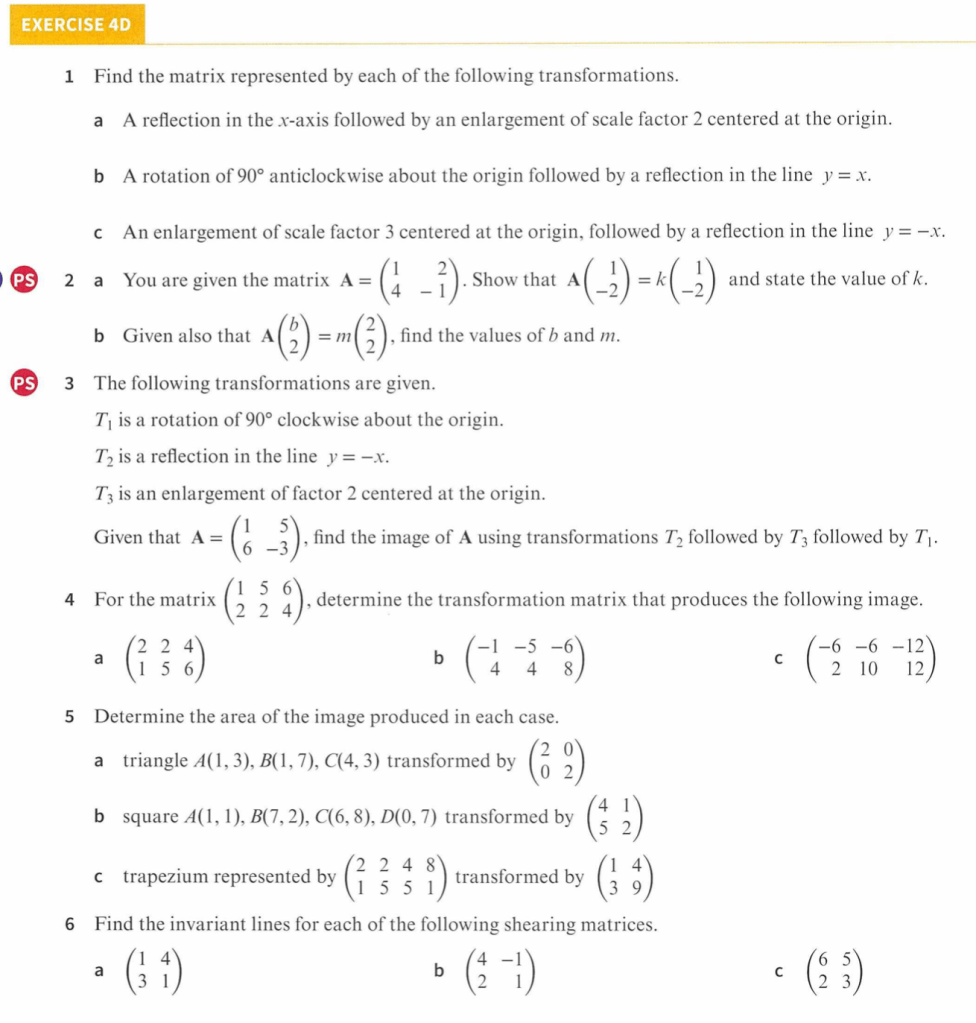
Exercise 4 (N.B. Question 8 goes beyond the syllabus)

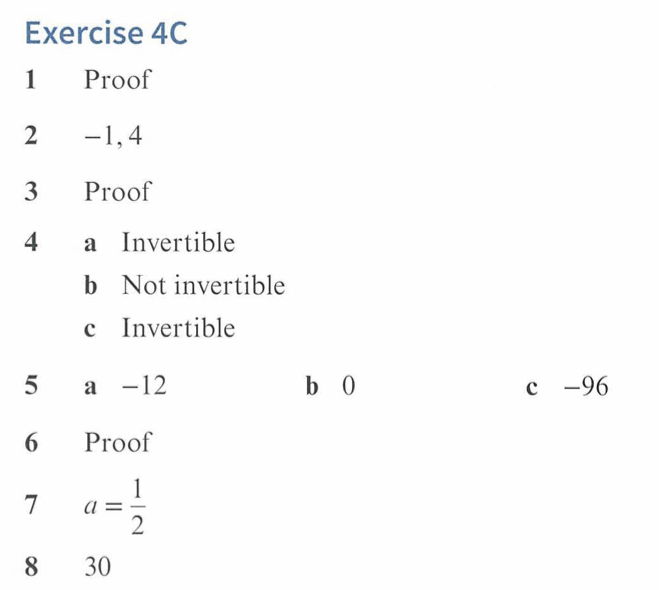
Answers to Exercise 4

Worked Solutions to Exercise 4
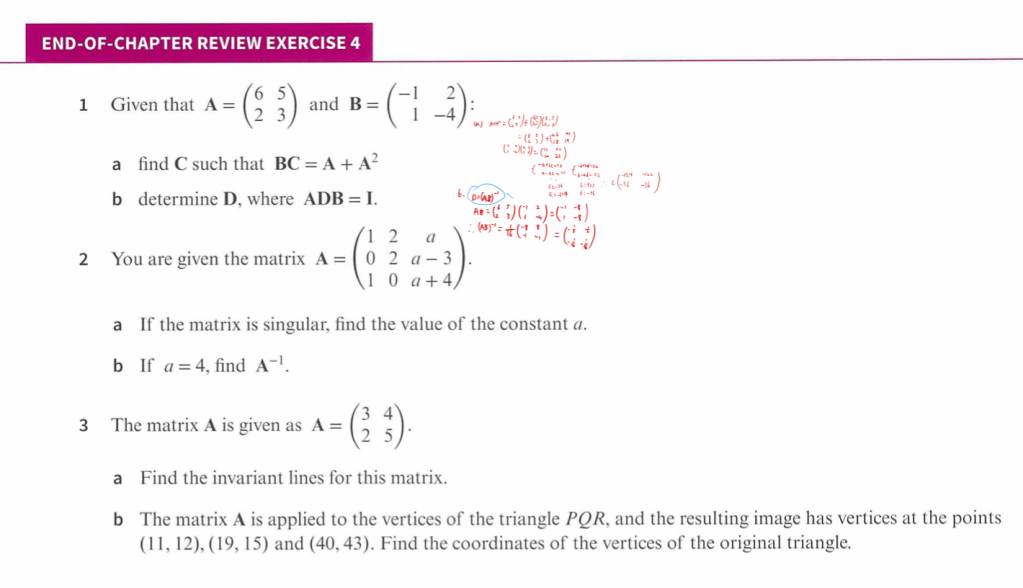
Combined Exercise
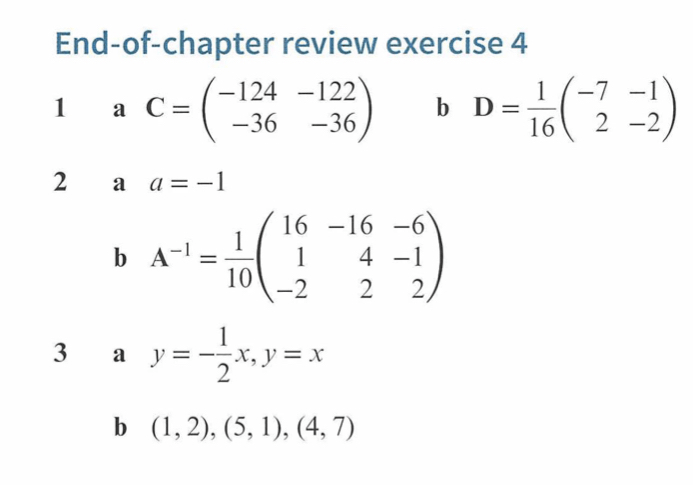
Answers
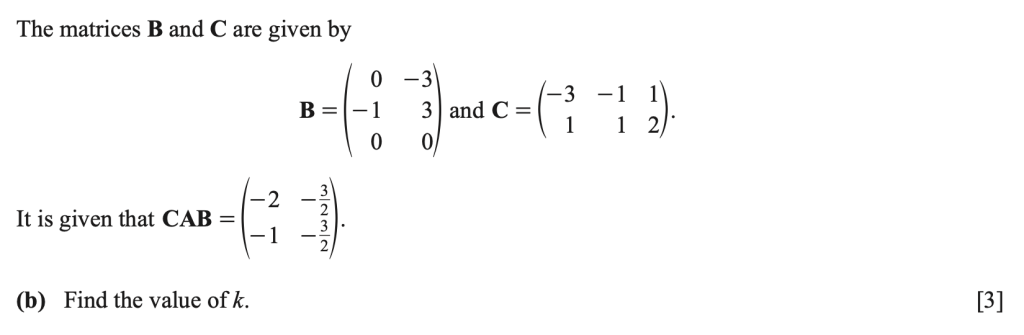
Past Exam Paper Questions
Summer 2020 Paper 13:


Summer 2020 Paper 13 Mark Scheme
Winter 2020 Paper 11:



Winter 2020 Paper 11 Mark Scheme
Winter 2020 Paper 12





