What is a differential equation?
What does it mean to solve them? (What is the difference between the general solution and a particular solution)
We can already solve DEs of the for y’=f(y)g(x)
What if we get something like xy’+y=x?
We can’t expect to always find DEs looking like the product rule. What about y’+3y=e-3x?
Any first order DE that is linear in y can be rewritten as y’+f(x)y=g(x).
We want the LHS to be in the form: u’v+uv’. To get it in this form we simply need to multiply through the whole equation by the integrating factor I(x)=e∫f(x)dx
Why does it work?
- y’+f(x)y=g(x)
- => I.y’ +f(x).I.y = I.g(x)
- We want I such that I’=f(x).I,
- =>
- =>
- => ln(I)= ∫f(x) dx
- => I=e∫f(x) dx


This method was developed by Leonard Euler around 1730 (the separating variables method had previously been developed by his teacher, Johann Bernoulli).
Worked Example 1
Find the general solution of the differential equation:

Worked Example 2
Find the particular solution of the differential equation: 
Worked Example 3
Solve the differential equation 
Exercise 1
1.) Solve the differential equation 
2.) Solve the differential equation 
3.) Solve the differential equation 
4.) The differential equation 
5.) Solve the differential equation 
6.) A differential equation is such that the rate of change of y with respect to x is equal to the sum of x and y. Write down the differential equation and find its general solution.
7.) Find the general solution for the differential equation 
8.) Given that the differential equation 

Answers
1.)

2.)

3.)

4.)

5.)

6.) 

7.)

8.)

Second Order ODEs
Consider ay’’+by’+cy=0
It is a linear combination of multiples of a function, its first derivative and its second derivative.
For these terms to all cancel out, we need a function whose first derivative and second derivative has the same form as the function itself. Which functions are suitable?
Putting in suitable constants, we take the function: y=Aetx
So y’=Atetx and y’’=At2etx
So ay’’+by’+cy = aAt2etx+bAtetx+cAetx = 0
Notice that Aetx factors out, so we have at2+bt+c=0. We call this the auxiliary equation for the ODE and its solutions give us the ODE’s solutions
How many solutions can there be to the auxiliary equation at2+bt+c=0?
- Suppose there are two solutions, t1 and t2. Then both the solutions y=Aet1x and y=Bet1x (for arbitrary constants A and B) are solutions to the ODE. We can say in general that the linear combination of these: y=Aet1x + Bet1x is the general solution to the ODE.
- Suppose there is one repeated solution, t0. Then y=(A+Bx)et0x is the general solution to the ODE.
Why is the solution in this form?
Consider y’’-4y’+4y=0, with AE: (t-2)2=0.
Clearly y=Ae2x is one solution. We know there should be another solution (and another arbitrary constant, so we can write y=f(x)e2x and try to find out the function f(x))
- y = fe2x
- => y’= f’e2x+2fe2x
- => y’’=f’’e2x+2f’e2x+2f’e2x+4fe2x = f’’e2x+4f’e2x+4fe2x
- If we substitute these into our ODE, y’’-4y’+4y=0, we get:
- y’’-4y’+4y=0
- (f’’e2x+4f’e2x+4fe2x) – 4(f’e2x+2fe2x )+4fe2x =0
- =>f’’=0
- => f’=c
- => f=cx+b. Which is why we use this form
- This method was derived by D’Alembert around 1750.
But what if the solution is complex?
Then y=Ae(a+bi)x+Be(a-bi)x
So y=eax(Ae(bi)x+Be(-bi)x)
y=eax(Ae(bi)x+Be(-bi)x)
We can simplify this using Euler’s Formula: ebix=cosbx+ibsinx
So y=eax(A(cosbx+isinbx)+B(cosbx-isinbx))
Gathering the cosines and sines together, we have: y=eax((cosbx(A+B)+sinbx(Ai-Bi))
Which is simply y=eax(Pcosx+Qsinx)
N.B. The note below explains why we are comfortable replacing Ai-Bi with a real number:
So, in general, we use the ODE to form the auxiliary equation and solve the auxiliary equation to find the general solution from the above.
We can then use initial conditions or boundary conditions to find out the particular solution (i.e. without any arbitrary constants)

Worked Example 1
Find the general solution of the differential equation

Worked Example 2
Find the general solution for the differential equation

Worked Example 3
Find the general solution of the differential equation

Worked Example 4
Find the general solution for the differential equation

Worked Example 5
The second order differential equation 

Worked Example 6
Given that the boundary conditions for the differential equation 
Exercise 2

Answers

Homegeniety
Have you noticed that for all of our second order differential equations, the right hand side of the equation was equal to zero?
What should we do if this isn’t the case? i.e. if the equation is non-homogenous?
First we should note that adding the general solution to the related homogenous equation to our solution will not change the solution (because it gives zero when put in the equation).
So our general solution to a non-homogenous equation will be of the form GS=CF+PI, where the solution to the related homogenous equation is now called the complementary function.
We find the particular integral relevant to the RHS of the equation by using a trial function, which is essentially a guess at the solution in the correct form, with constants in to be determined.
How to find the Particular Integral

Note that we need both trigonometric functions in our trial function because of the way differentiation cycles through these functions.
Special cases
In some differential equations the function on the right-hand-side has the same form as one of the complementary functions. For example, the complementary function of the differential equation 




This illustrates a general rule. If the function on the right-hand-side of the differential equation has exactly the same form as one of the terms of the complementary function, you multiply the usual trial function by the independent variable to give a new trial function. In order to recognise these special cases when they arise, it is worth getting into the habit of finding the complementary function before the particular integral.
Worked Example 1
For 
Worked Example 2
Given that 
Worked Example 3
Find the general solution for

Worked Example 4
Determine the general solution for the differential equation

Worked Example 5
The differential equation 



(N.B. In this example, because e-4t and te-4t are both present in the complementary function, we need to use t2e-4t within the particularl integral)
Worked Example 6
Determine the general solution for 
Exercise

Solutions

Substitution methods for ODEs. Form: f(y/x)
If an ODE is of the form y’=f(y/x) we can use the substitution y=ux, which replaces y/x with u and y’ with u’x+u, giving an equation in separable form.
Worked Example. Form y/x
Using a suitable substitution, solve the differential equation 
Form: F(ax+by)
ODEs of the form 
Worked example. Form F(ax+by)
Using the substitution u = 3y + 2x, find a general solution for the differential equation

Worked Example. Particular solution
Find the particular solution for the differential equation 


Substitution methods for second order ODEs
We can often use a substitution u=yx (where y is a function of x, to simplify a second order ODE (exam questions may give a specific alternate substitution).
If u=yx, then u’ = y’x+y and u’’=y’’x+2y’. We can rearrange these to put y in terms of u before substitution into an equation.
Worked Example. Second Order ODEs
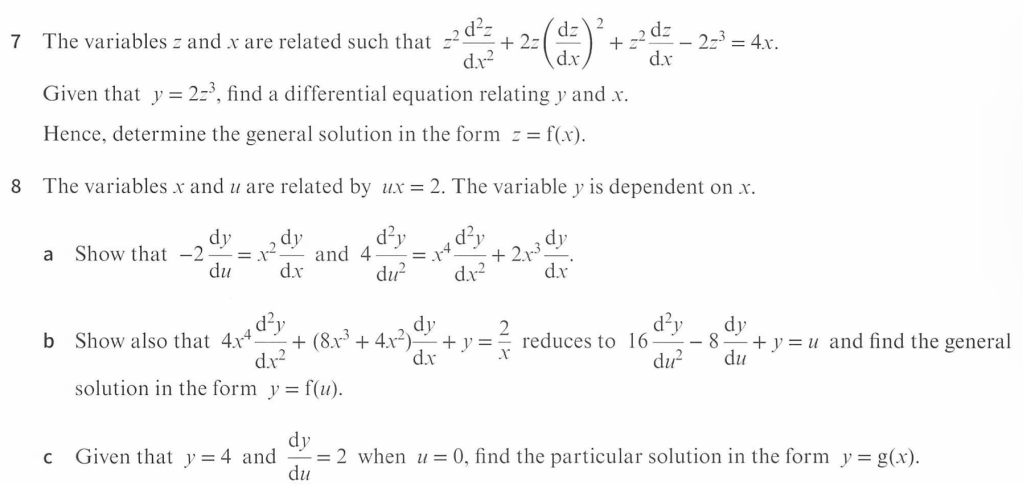
Using the substitution y=ux, show that the differential equation 

Substitutions which introduce a new variable
Some ODEs are best solved by introducing a new variable, e.g. x=et
We then use the fact that 

Worked Example. Introducing a Variable 1
The initial conditions for the differential equation 


Worked Example. Introducing a Variable 2
Using the substitution 


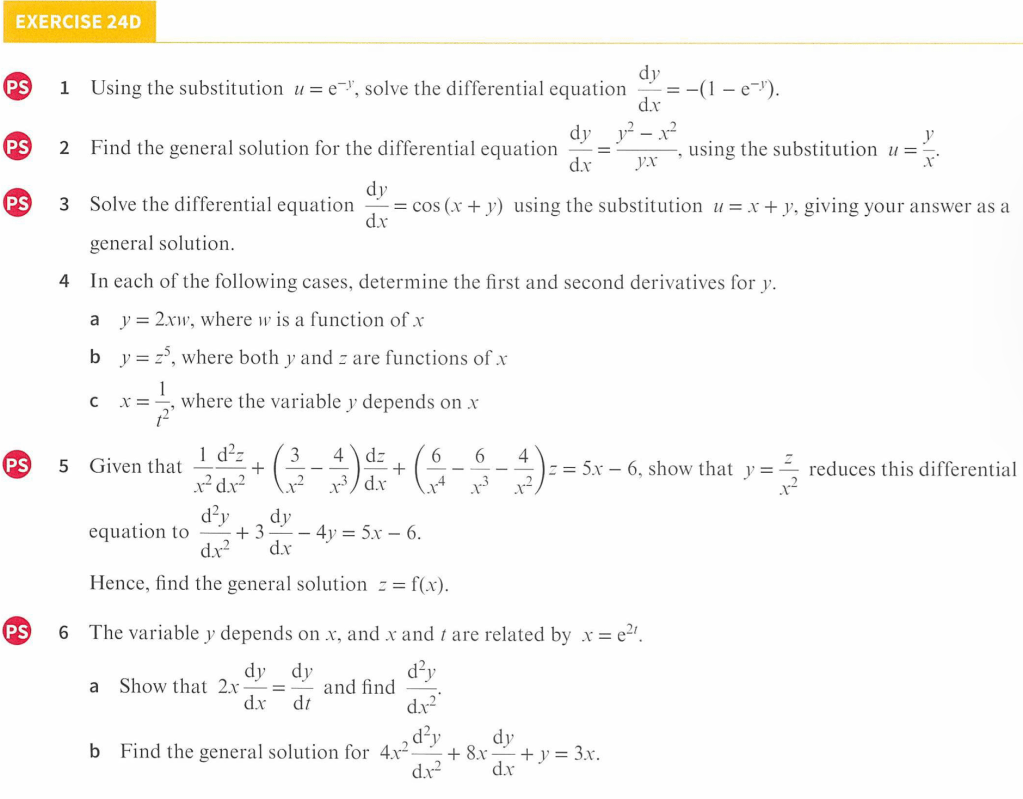
Exercise
Notes for exams
With substitutions suggested in an exam, there is normally one way to have the substitution that is easier to differentiate (normally it is given in this form). After differentiating it the easy way, algebra can be used to rearrange it into the form needed to.
General Exercise
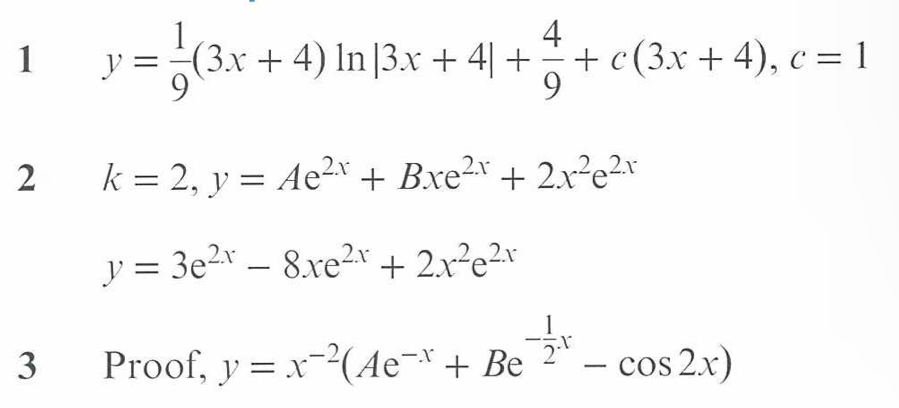
Answers